IndoLayout: Leveraging Attention for Extended Indoor Layout Estimation from an RGB Image
Shantanu Singh, Jaidev Shriram, Shaantanu Kulkarni, Brojeshwar Bhomwick, and K. Madhava Krishna
In International Conference on Intelligent Robots and Systems (IROS) 2022
In this work, we propose IndoLayout, a novel realtime approach for generating high-quality occupancy maps from an RGB image for indoor scenes. Such occupancy maps are often crucial for path-planning and mapping in indoor environments but are often built using only information contained in the ego view. In contrast, our approach also predicts occupancy values beyond immediately visible regions from just a monocular image, leveraging learnt priors from indoor scenes. Hence, our proposed network can produce a hallucinated, amodal scene layout that includes areas occluded in the RGB image, such as a navigable floor behind a desk. Specifically, we propose a novel architecture that uses self-attention and adversarial learning to vastly improve the quality of the predicted layout. We evaluate our model on several photorealistic indoor datasets and outperform previous relevant work on all metrics that measure layout quality, including newly adopted ones. Finally, we demonstrate the effectiveness of our method by showing significant improvements on the PointNav task over similar approaches using IndoLayout.

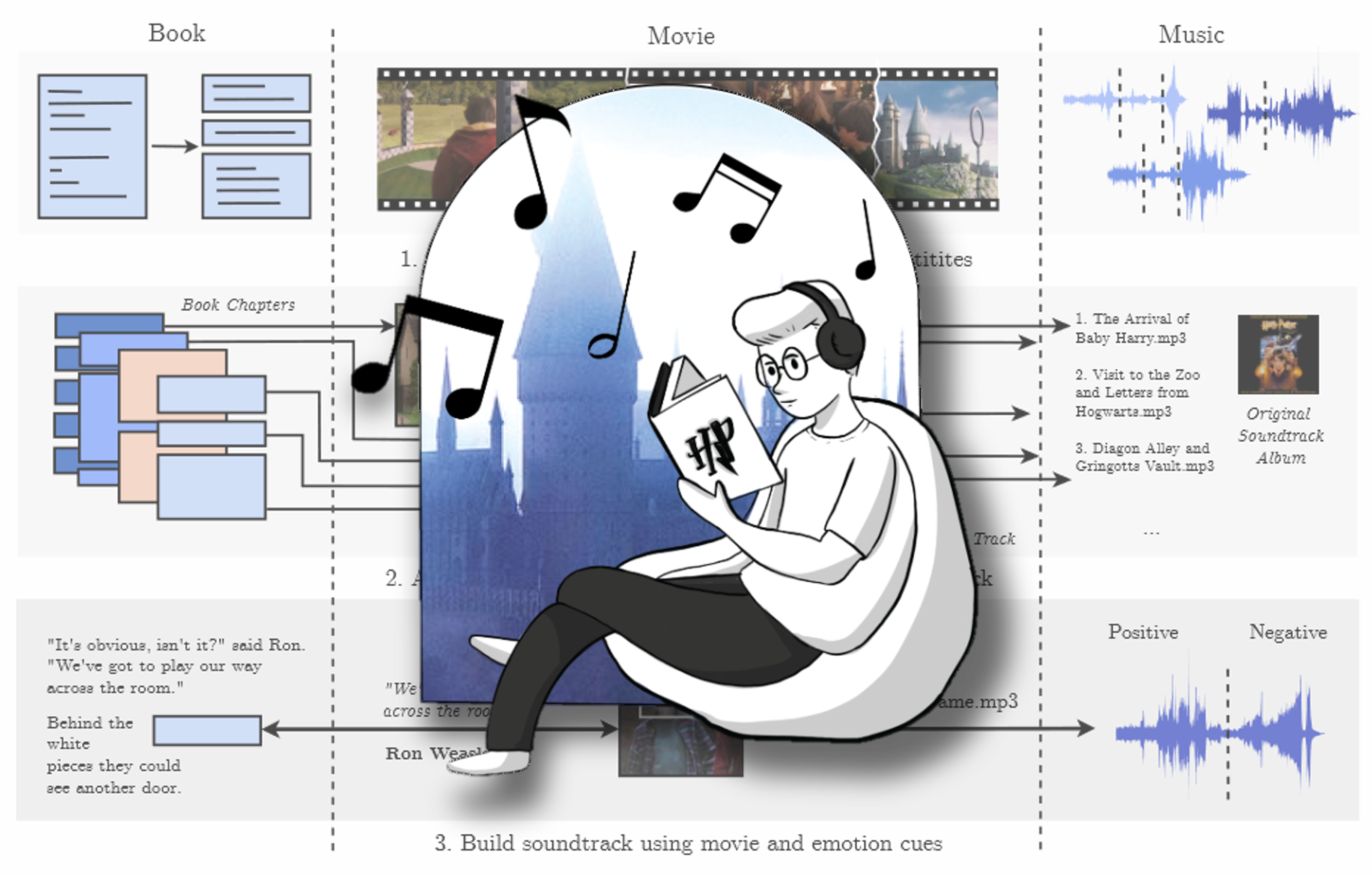 Sonus Texere! Automated Dense Soundtrack Construction for Books using Movie AdaptationsIn International Society for Music Information Retrieval (ISMIR) 2022🏅 Brave New Idea Award!Press: * Times of India * The Hindu Businessline * IIIT-H Blogs * Eenadu (Telugu Newspaper) * Good E Reader * Newstap
Sonus Texere! Automated Dense Soundtrack Construction for Books using Movie AdaptationsIn International Society for Music Information Retrieval (ISMIR) 2022🏅 Brave New Idea Award!Press: * Times of India * The Hindu Businessline * IIIT-H Blogs * Eenadu (Telugu Newspaper) * Good E Reader * Newstap